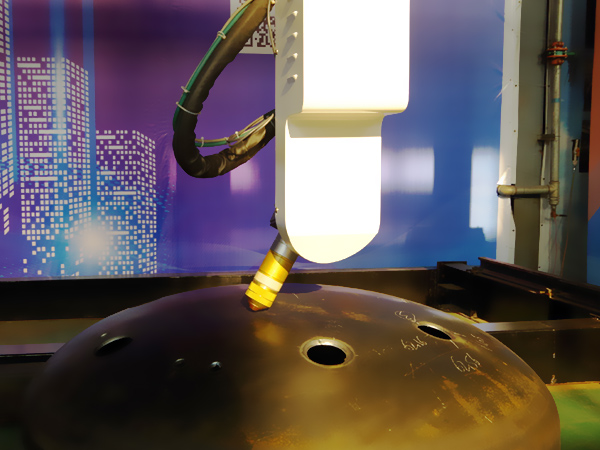
椭圆封头坡口切割机器人简介
椭圆封头坡口切割机器人采用数控龙门桁架式结构,X、Y、Z、U、V五轴伺服联动,X、Y、Z实现空间任意位置定位,U、V实现割枪任意姿态控制。本设备为一套封头全自动开孔切割机,用于椭圆形封头、碟形封头、半球封头的开孔切割热加工。可全自动、一次性连续完成封头上所有开孔切割工作,切割表面光滑、切割精度高,大量节省人工二次修正时间
持封头类型:椭圆形封头
支持开孔类型:中心孔、偏心竖直孔、偏心法向孔、偏心与竖直方向成偏转角度的孔
椭圆封头坡口切割机器人优势
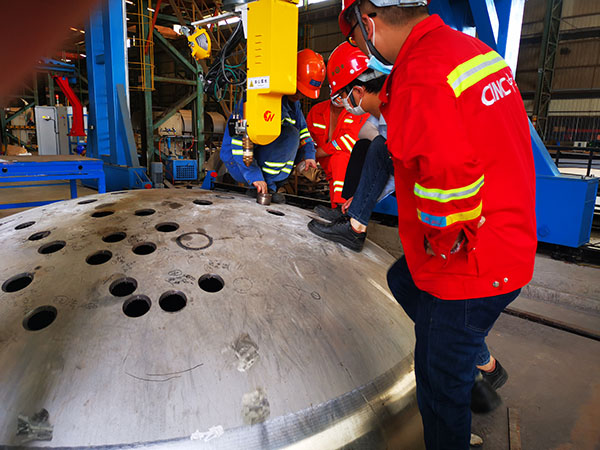
装备智能化、封头任意摆放、视觉扫描自动定位封头位置,无需工装夹具开孔质量高、切割精度高、表面光滑, 切割后无需人工修正和打磨
生产效率高、全自动、一次性连续完成封头上所有孔的切割动作,相比人工切割效率提升10倍以上
全自动一次性连续完成工料切割,支持多种零件破口切割;
配备离线编程软件,可生成电子表格形式离线程序,直接导入系统进行切割;
系统内置开放式工艺数据库,根据用户输入工件厚度,自动调取工艺数据工艺数据库对用户开放,用户可编辑、添加、删除工艺数据;
程序界面显示二维动图,指示切割动态进度;
设备配备无线遥控器,提高操作方便性;
定期提示用户进行维护和保养,保证设备长期稳定运行
装备智能化,零件任意摆放,视觉扫描自动定位零件位置;
实现料台上,工件随意摆放。多种异性工件拍照、扫描识别;
坡口切割质量高、精度高、表面光滑、切割一次成形,无需修正打磨;

椭圆封头坡口切割机器人结构
坐标轴定义:
X轴:龙门横梁上的移动小车定义为X轴
Y轴:龙门沿导轨移动方向定义为Y轴
Z轴:立柱升降方向定义为Z轴
U轴:机头沿回转支撑旋转定义为U轴
V轴:割枪绕水平轴偏摆定义为V轴
椭圆封头坡口切割机器人各轴结构
X、Y、Z采用高精度齿轮、齿条传动,直线导轨定位,U轴采用行星齿轮传动,V轴采用多级齿轮传动。
机头由回转轴和偏摆轴组成,可以实现割枪任意姿态控制,完成空间坡口切割任务。割枪安装座上安装有激光视觉轮廓测量传感器,与割枪同步旋转。机头部分结构
封头怎么做平口处理
封头是压力容器上使用的堵塞装置,对密封性有非常严格的要求。因为密封性会关系到压力容器的使用,半球形封头加工厂,严重时甚至会出现工作事故,因此,密封性必须要十分注意。我们知道,为了让封头具有更好的密封性,通常封头在制作完成后,会对其进行平口处理,使其与压力容器可以更好的衔接在一起。